
AEGIS
RESCUE TECHNOLOGY PLATFORM
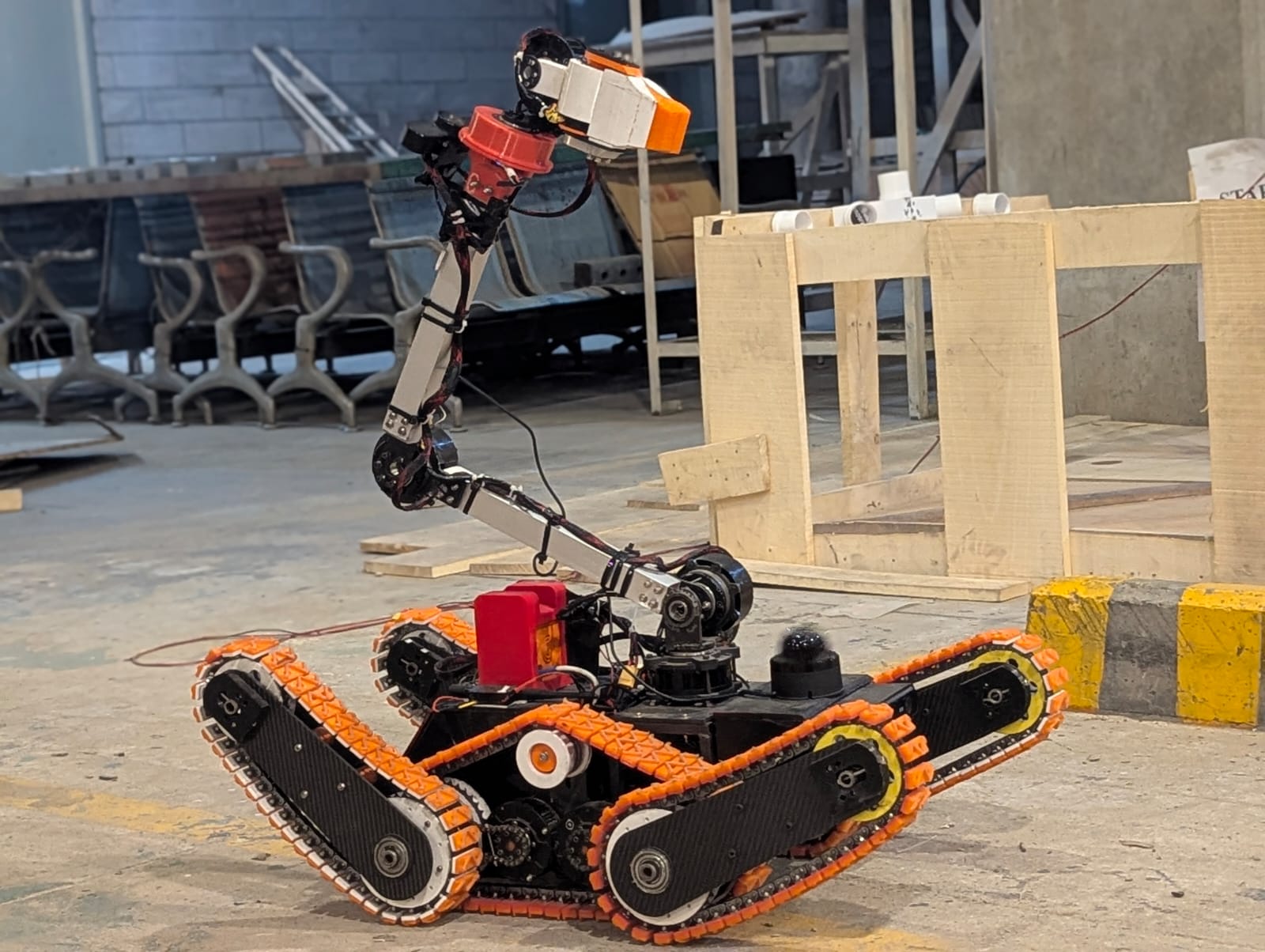
AEGIS is a tracked Unmanned Ground Vehicle (UGV) designed for USAR (Urban Search and Rescue)environments. It integrates high-mobility locomotion with active flippers, a multi-sensor perception stack, and a 6-DOF robotic manipulator for dexterous interaction in confined and hazardous spaces.

LOCOMOTION
Tracks + Active Flippers
Continuous rubber tracks with articulated front and rear flippers enable traversal of stairs, rubble piles, and extreme terrain profiles found in disaster zones.
PERCEPTION
Multi-Sensor Stack
Integrated LiDAR, RGBD depth cameras, and IMU provide a 360° spatial awareness pipeline for SLAM-based mapping and victim detection.
MANIPULATION
6-DOF Robotic Arm
A 6 degree-of-freedom articulated arm allows the robot to interact with victims, open doors, move debris, and operate equipment in confined hazardous spaces.

ZUGBEE X1
ADVANCED SEARCH & RESCUE PLATFORM
Our inaugural rescue rover the platform that started it all. Completed in January 2025, Zugbee X1 established the foundational architecture, sensor integration pipeline, and software stack that AEGIS builds upon.



THE FOUNDATION OF AEGIS
Zugbee X1 taught us everything we needed to build AEGIS. From mechanical design constraints to software architecture decisions, the lessons from our first prototype directly shaped Bangladesh's RoboCup 2026 entry.